Press, PR & Media
Enhancing Robotic Telepresence Through Soma-Bits: a recent workshop and reflections

Researchers from the Mixed Reality Lab are pursuing an exploration into Mobile Robotic Telepresence leveraging embodied design principles and the use of Soma-bits, to break the current paradigm of telepresence technologies.
Mobile Robotic Telepresence is often presented as the holy grail of hybrid communication – the ultimate solution against the constraints of the traditional, static video-conferencing. Telepresence robots consist of a video-conferencing system (monitor, camera, speaker and microphones) mounted on a mobile, remotely controllable device. The user logs into an online interface that allows them to `drive’ this device, so that they can freely move around in an environment, whilst having a video call with other people located there.
These robots have been used in a variety of situations (remote work, healthcare, education, museums), but they are far from mainstream. Considering that they are not new – they have been commercially available for at least the last decade – it’s worth questioning whether the common design paradigm truly fulfills the needs of hybrid communication.
Interactions via robotic telepresence focus primarily on visual and auditory communication, with limited use of embodiment. Most telepresence robots models follow similar design in terms of size and movement capabilities – a little bit shorter than the average person and they can move across a room or down a corridor, however other elements of interaction, such as haptics, object manipulation, gestures and expressive movements are not available.
What we are missing from traditional video-conferencing, is not the ability to walk across a room, but smaller, more meaningful and perhaps more fine-tuned movements (the ability to lean in, turn, point and manipulate objects). We still need to understand which forms of movement are relevant and how they should be implemented in embodied communication technologies like robotic telepresence.
To bridge this gap, we held a workshop, where we introduced real use-cases for robotic telepresence and invited participants to ‘act out’ scenarios, using telepresence robots. Our approach was influenced by soma design, and focused on using lived, embodied experiences as inspirations for design.
The Workshop
The workshop was held on January 12th as part of GROUP ‘25. We followed an hybrid format, with eight online attendees, and four people from the organising team joining together from the Cobot Maker Space. Using the Cobot Maker Space as our base, allowed us to make use of the lab’s telepresence robots, which the online participants were invited to test out during the activities.




We divided the workshop into two main sections: 1) understanding use cases, 2) Interactive body-storming. During the first part, we invited researchers with expertise in specialised areas (elderly care, stroke rehabilitation, education and museums) to present a use-case for robotic telepresence and build a specific scenario for its use. To aid in building the scenario, the presenters were asked questions about what the environment looked like, and what forms of movement, observation and manipulation were necessary to carry out the key parts of the task.
In the second part, the attendees were split into groups based on their interests and were asked to select one of the presented use cases. Using the information from the presentation, they were asked to come up with the design requirements for completing that scenario’s task remotely using robotic telepresence. To support their ideation, we invited them to try the two telepresence robot models available at the Cobot Maker Space – Temi and Double 3. We also gave them access to soma-bit actuators with the vibrating function. Driving the robots, they could get a hands-on, embodied understanding of robotic telepresence. By attempting to role-play the actions of the scenarios using our robots, they could work out which forms of embodied movement were relevant and what was missing from current robots.
The aim of this workshop was not to come up with a complete and viable new design, but rather to engage in a discussion about what should matter when we think about telepresence and hybrid interactions. Centering ideation around embodied experience, and using real, concrete use cases as our foundation, allowed us to side-step concepts such as media richness or immersion, and focus on the practical realities of communicating through technology.
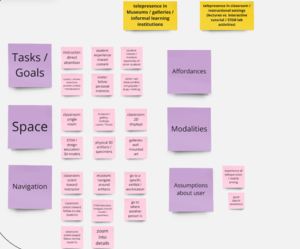
Miro was used as a shared note-taking space
Reflection:
One limitation of our workshop was that all attendees were joining online. Whilst it might have been beneficial for the exercise to leverage the real constraints of remote participation, it was difficult to recreate a hybrid activity with only a few people on the ‘local’ side and only two robots available for eight people. The remote attendees tried the robots to understand how they work, but we were not able to carry out role-playing exercises to their full extent.
In addition, although we gave attendees remote access to the soma-bits, and demonstrated how they work, it was difficult for them to grasp their use and function remotely. From their end, they only got the experience of pressing a button. In future iterations of the workshop, we might have to think more carefully about how we implement soma-bits into the activities – perhaps sending the actuators to the remote attendees or focusing on in-person events where everyone can properly explore how to use them.
Next steps:
Following our learnings from this workshop, we wish to further explore how soma design can inform the design of robotic telepresence. Robotic telepresence is an inherently embodied form of mediated communication and yet the realities of embodied action remain largely ignored in work in this area.
We are also exploring the use of games and playfulness as an avenue for eliciting interesting, spatial and embodied interactions using robotic telepresence.
More information can be found on the GROUP25 website
And on the proceedings: https://dl.acm.org/doi/abs/10.1145/3688828.3699632
Previous workshop on this topic: https://dl.acm.org/doi/abs/10.1145/3565066.3609791